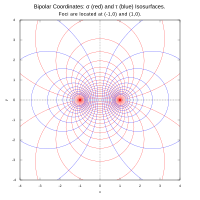
Bipolar coordinates
So imagine you have a toy robot that can move around a flat surface. Its starting point is in the center of this flat surface which has lines drawn on it to make perfect squares like graph paper.
Now, your robot can move forward and backward and side to side just like you can when you walk. Let's say the robot's forward/backward movement is called its "radius" and its side-to-side movement is called its "angle".
Now, when the robot moves, we want to keep track of where it is on our graph paper. This is where bipolar coordinates come in.
Instead of saying the robot is at a certain point on the graph paper, we use a special system of coordinates called bipolar coordinates.
In polar coordinates, you would only use the radius and the angle to locate the robot's position on the graph paper. But in bipolar coordinates, you use two radii- one for each axis- to pinpoint the robot's location.
So if we call the x-axis radius "r1" and the y-axis radius "r2", we can say the robot is located at a certain "r1" and "r2" on the graph paper.
This way of locating objects is used in many different fields, like navigation, mapping and even in astronomy!
Now, your robot can move forward and backward and side to side just like you can when you walk. Let's say the robot's forward/backward movement is called its "radius" and its side-to-side movement is called its "angle".
Now, when the robot moves, we want to keep track of where it is on our graph paper. This is where bipolar coordinates come in.
Instead of saying the robot is at a certain point on the graph paper, we use a special system of coordinates called bipolar coordinates.
In polar coordinates, you would only use the radius and the angle to locate the robot's position on the graph paper. But in bipolar coordinates, you use two radii- one for each axis- to pinpoint the robot's location.
So if we call the x-axis radius "r1" and the y-axis radius "r2", we can say the robot is located at a certain "r1" and "r2" on the graph paper.
This way of locating objects is used in many different fields, like navigation, mapping and even in astronomy!
Related topics others have asked about: